|
◆ 파워개미
PCB 부품 조립 방법
1. 조립하기 전에 회로도와 부품리스트를
비교하여, 빠진 부품이 있는지 확인하자.

2. 전원부의 부품들을 납땜하자.


3. 헤더핀
및 부져, DIP SW을 납땜하여 보자.


4. cpu,
ISP포트, 20PIN, 14PIN, 8PIN IC 소켓을 납땜하자.


5. LED,
저항, 적외선 센서 소켓을 납땜하자.


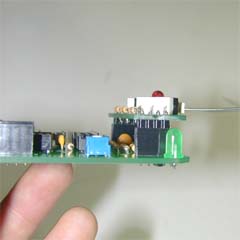
6. 더듬이
센서를 만들어 보자. 센서역활은 리미트스위치에 의해서
작동하게 되어 있다.


6. 기판에
리미트 스위치, 저항, 헤더핀을 납땜하자. 이때, 헤더핀은
밑에서 위로 꽂고 위에서
납땜을
수행하여야 한다.

7. 더듬이 센서 모듈을 완성되었으면
CPU 메인 보드와 결함하여 보자.

◆ 파워개미
몸체 조립 방법
1. 우선, 파워개비로봇의 몸통부분을
만들어 보자.각각의 품목들을 비교하여 보자.
.

2. 파워개미로봇의 다리부분을 연결하기 위한 부분을 조립하자.
제공되는 나사로 몸체의 4곳을
밑에
그림과 같이 연결한다. 여기서, 나사를 너무나 강하게
조이지 말도록 하자.


3. 파워개미의
4개 다리를지지하기 위해 밑에 있는 그림과 같이 다리를
홈에 끼워서 강력접착제로
접착을
하도록 하자. 오른쪽에 있는 그림은 4개의 다리를 모두
접착한 모습을 보이고 있다.


4. 파워개미로봇의 중간다리를
지지하기 위한 가이드를 만들어 보자. 중간 가이드를
몸체와
결함한 후에 강력본드로
접착하여 떨어지지 않도록 하게 한다.



5.
파워개미의 앞다리와 뒷다리가 동시에 움직이도록 철사로
밑에 있는 사진과 같이 연결한다.
이때,
양쪽다리가 평행하게 유지되도록 조정하여야 개미가
걸아갈 때 평행하게 진행할 것이다.


6.
서버모터(HS-303)를 밑에 있는 그림과 같이 파워개미몸체와
연결하도록 하자.


7. 서보모터(HS-303)과
연동되어서 다리가 움직이도록 밑에 있는 그림과 같이
연결한다. 철사를
구부릴 경우에 손을
조심하도록 하자.


8.
파워개미의 중간다리를 움직이기 하는 서보모터(HS-303)을
밑에 있는 그림과 같이 연결하도록
하자.
이때 이용되는 "ㄱ"자 프레임을 이용해서
사용하면 튼튼할 것이다.


10. CPU보드를 파워개미로봇에
마운트시키도록 하자. 파워개미로봇의 4곳에 스페이서를
고정하고
제작된 CPU보드를
연결하면 파워개미제작이 끝난 것이다.
 
11.
이제 , 로봇이 완성되었으면 개미로봇이 걸어갈 것이다.
그러나, 각각의 동작 프로그램을 사용자들이
직접
작성하여 AT90S8515 cpu에 넣는 방법을 알아보도록
하자...AT90S8515(AVR)은 ISP기능이 있어서
ISP케이블만
있으면 "롬라이터"라는
장비가 필요없이도 저가의 "ISP케이블"만
으로도 프로그램을 집어 넣을
수 있다는 장점을
가지고 있다. 그럼, 사용법을 알아보자.
*ISP케이블로
작성한 프로그램 다운로드하기
1. 먼저 "ISP케이블"을
프린트 포트와 개미의 "ISP포트"에
연결한다.


2.
CodeVision C 컴파일러로
컴파일후 풀업메뉴에서 tools->chip Programmer를
하면 CodeVisionAVR
Chip Programmer
창이 나타난다. File을 클릭하여 Load파일을 불러온다.
File을 클릭 한 후 Load파일을
불러온
후에 컴파일후에 나온 파일(xxx.rom)파일을 불러온다.
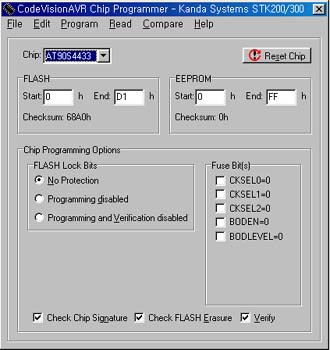

3. Program을 클릭하고 Erase Chip을 선택해서
전 프로그램을 지운다. 그리고 Flash을
눌러 프로그램을
다운로드한다 이때 주의할점은 개미의
리셋을 누룬상태에서 작업을
해야한다는
것이다.(주의 : Erase Chip과
Flash 기능을 할 경우에 연속적으로 리셋을 누리지말
것)

4.
프로그램이 다운로딩되는 것을 확인할 수 있을 것이다.
완료되면 ISP케이블을 제거하면 모든 작업운
끝난
것이다. 즐거운 로봇의 움직임을 감상하세요.....마치
개미가 걸어가는 모습과 같이 워킹을 할 것입니다...
|