|
1. RoboBlock
Basic2K4 로봇 키트
* 메인 모듈(서보모터
제어kit)
사진에서와 같이 로봇의 핵심이 되는 것이 메인 모듈이다. 여기에 여러 모터나 소자 등을 연결하고 프로그램을 하는 것이다. 여기 메인 모듈에 우리가 흔히 듣는 CPU와 메모리라 부르는 ROM, RAM 이 부착되어 있다. 그리고 축전기와 저항 등의 소자들이 들어가고 모터나 LED, 부저 등을 끼울 수 있도록 포트가 나와있다.
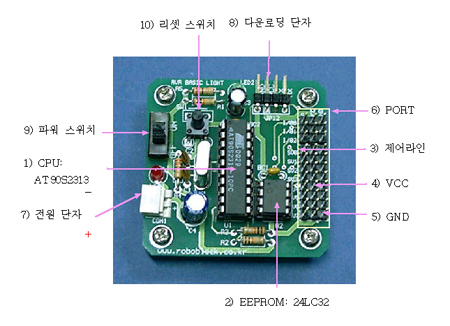 사진1.1 [메인 모듈]
1) CPU: RoboBlock Basic2K4 컨트롤러는 AT90S2313 칩을 사용하는데, 내장된 메모리에 로보블럭 시스템에서 제작한 동작을 위한 프로그램이 들어간다.
2) EEPROM: 사용자가 로보 베이직에서 컴파일한 프로그램이 여기에 저장된다. EEPROM은 EPROM과 달리 계속해서 프로그램을 넣었다 지웠다 할 수 있다.
3) 제어라인: 사용자가 프로그램을 하면 여기로 신호가 HIGH와 LOW가 뜨게 되어 소자나 모터 등을 제어할 수 있다.
4) 전원 라인(VCC): +5V가 인가된다.
5) 접지 라인(GND): 접지가 되는 곳이다.
6) 포트(PORT): 입출력 포트는 I/00, I/01, I/02 의 셋 포트가 있고, 서보 모터를 위한 SV0~SV7 까지의 여덟 포트가 있다.
7) 전원 단자: 파워 서플라이(Power supply)를 연결해주는 곳으로 +5V를 연 결해주면 된다. 물론 건전지를 연결해서 사용할 수 있다.
8) 다운로딩 단자 : 사용자가 윈도우즈 상에서 컴파일한 프로그램을 커넥터를 사용하여 이곳으로 다운로딩을 시킨다.
* 프로그램 - RoboBlock 베이직
이런 메인이나 서브 모듈에 필요한 부품들을 연결했다면 그 다음엔 동작을 시키기 위해서 우린 프로그램을 작성해야 한다. 그 프로그램은 같이 제공되는 CD안에 프로그램을 인스톨시키면 되는데 설치
방법은 다음 절에 따로 첨부하였으니 참조를 하여 설치하도록
하자.
-
RoboBlock
Basic2K4 인스톨 버전
- RoboBlock
Basic2K4
사용자 설명서
-
RoboBlock Basic2K4 베이직 명령표
-
RoboBlock Basic2K4 회로도
- RoboBlock
Basic2K4
HEX 파일
- Basic
소스프로그램의 예
* 다운로딩 케이블
프로그램을 모듈로 전송 시켜야 하는데 보통은 프로그램을 컴파일러라 부르는 프로그램을 이용하여 기계가 알아 볼 수 있는 기계어로 바꾸어 롬라이터라는 장비로 롬(ROM)에 집어넣어야 한다. 그러나 여기서는 그런 복잡한 단계를 없앴기 때문에 사진에 보이는 다운로딩 케이블을 프린터 포트에 연결하고 반대편을 모듈에 연결하여 프로그램을 다운로딩 시키면 된다.

사진1.2 [다운로딩 케이블 외형]
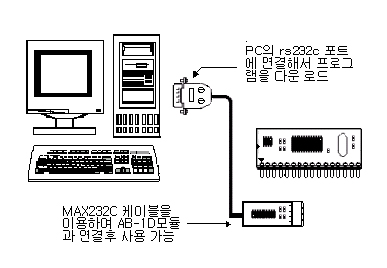
그림1.1 [다운로딩 케이블 연결방법
|